TO1. Development of a cooperative multi-component system capable of interacting with a diver in unpredictable situations and supporting cognitive reactivity to the non-deterministic actions in the underwater environment.

All the vehicles developed and used for CADDY experiments passed the formal risk assessment and mitigation measures were identified to reduce the operational hazards to offshore diving industry ALARP (as low as reasonably practicable) levels. Special attention was placed on integrating safety features in the form of kill switches on the BUDDY AUV. The list of developed and modified vehicles for the purposes of CADDY trials is given below.
Surface segment: The primary surface vehicle is MEDUSAs (IST), the backup vehicle is PlaDyPos (UNIZG-FER).
Underwater segment: The primary surface vehicle is BUDDY (UNIZG-FER), an AUV built specially for CADDY purposes. BUDDY is mounted with an underwater tablet as a means of interaction with the diver. In addition it is equipped with a stereo camera, mono camera, multibeam sonar, all used for "seeing the diver". The backup vehicles is e-URoPe (CNR) a hybrid between AUV and an ROV.
Interfacing the diver: An underwater tablet casing has been designed and produced. An Android application for interfacing with the diver has been developed.
|

|

|
|
MEDUSAS by IST
- primary surface vehicle
- light, streamlined vehicle with 2 thrusters
- 1035 mm long, weigh 23-30 kg
|
PlaDyPos by UNIZG-FER
- backup surface vehicle
- omnidirectional vessel with 4 thrusters in X configuration 0.7 x 0.7 m, weight cca. 30 kg
|
|

|

|
|
BUDDY AUV by UNIZG
- primary underwater vehicle
- first AUV custom made for interaction with divers
- fully actuated with 6 thrusters
- stereo and mono camera, high-resolution multibeam sonar
- mounted underwater tablet for providing feedback to the diver
|
e-URoPe by CNR
- backup underwater vehicle
- fully actuated underwater robotic platform with 4 horizontal and 4 vertical thrusters allows complete motion capability and hovering
- 1.3 (length) x 0.9 (width) x 1.0 (height) m, rated up to a depth of 200 m
|
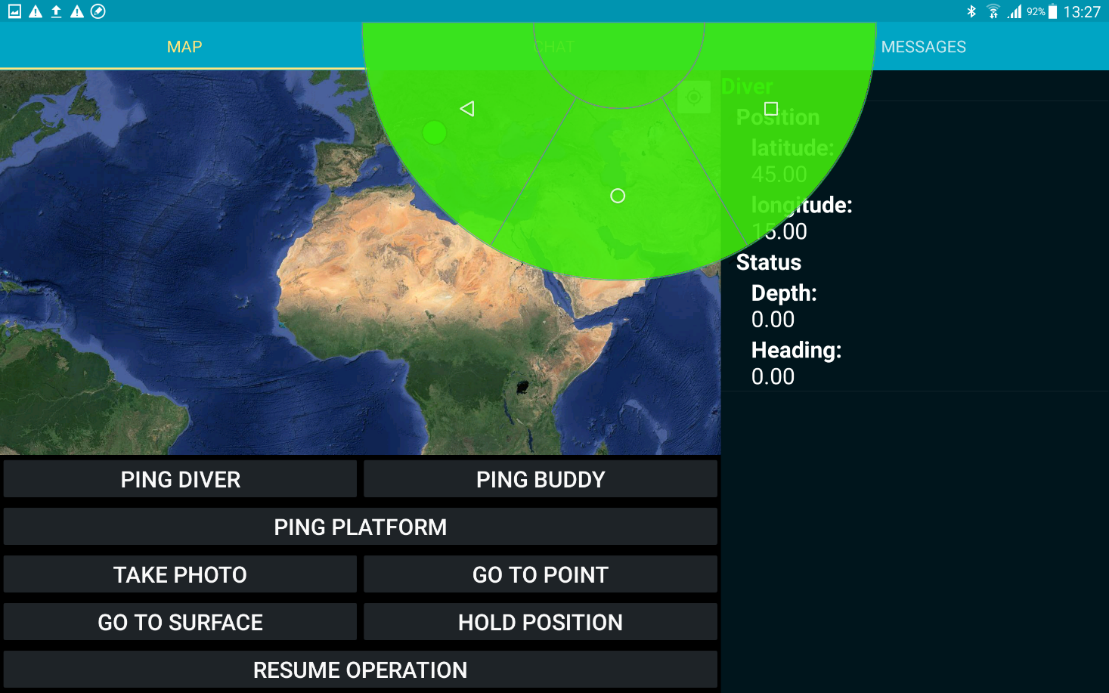
A screen from the application developed for an Android tablet that is used by the diver.
This objective has been successfully completed.