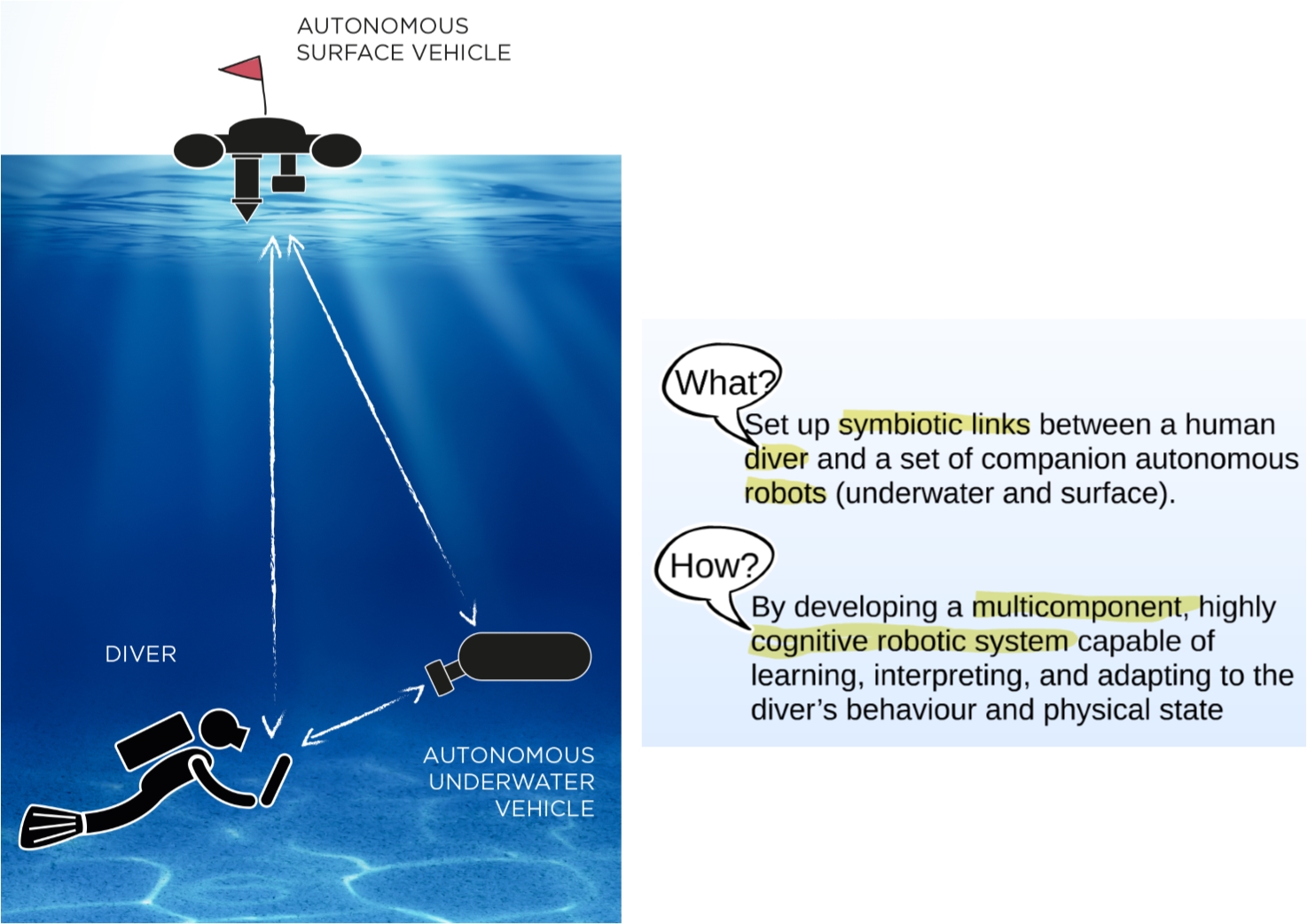
Divers operate in harsh and poorly monitored environments in which the slightest unexpected disturbance, technical malfunction, or lack of attention can have catastrophic consequences. They manoeuvre in complex 3D environments, carry cumbersome equipment, while performing their mission. To overcome these problems, CADDY aims to establish an innovative set-up between a diver and companion autonomous robots (underwater and surface) that exhibit cognitive behaviour through learning, interpreting, and adapting to the diver’s behaviour, physical state, and actions.
The CADDY project replaces a human buddy diver with an autonomous underwater vehicle and adds a new autonomous surface vehicle to improve monitoring, assistance, and safety of the diver’s mission. The resulting system plays a threefold role similar to those that a human buddy diver should have:
- the buddy “observer” that continuously monitors the diver;
- the buddy “slave” that is the diver's “extended hand” during underwater operations performing tasks such as “do a mosaic of that area”, “take a photo of that” or “illuminate that”; and
- the buddy “guide” that leads the diver through the underwater environment.



The envisioned threefold functionality will be realized through S&T objectives which are to be achieved within three core research themes:
- the “Seeing the Diver” research theme focuses on 3D reconstruction of the diver model (pose estimation and recognition of hand gestures) through remote and local sensing technologies, thus enabling behaviour interpretation;
- the “Understanding the Diver” theme focuses on adaptive interpretation of the model and physiological measurements of the diver in order to determine the state of the diver; while
- the “Diver-Robot Cooperation and Control” theme is the link that enables diver interaction with underwater vehicles with rich sensory-motor skills, focusing on cooperative control and optimal formation keeping with the diver as an integral part of the formation.